iCub es un robot humanoide de código abierto de un metro de altura para la investigación de la cognición social e inteligencia artificial.
Fue diseñado por el Consorcio RobotCub de varias universidades europeas y construido por el Instituto italiano de Tecnología, y ahora está apoyado por otros proyectos como ITALK.[1] El robot es de código abierto, con el diseño del hardware, del software y la documentación, todo liberado bajo la licencia GPL. El nombre es un acrónimo parcial, cub viene de Cuerpo Universal Cognitivo (Cognitive Universal Body en inglés). La financiación inicial para el proyecto fue de 8.5 millones de euros de Unit E5 – Robótica y Sistemas Cognitivos - del Sépitmo Programa de Framework de la Comisión Europea, y esto duró 65 meses, desde el 1 de septiembre de 2004 hasta el 31 de enero de 2010.
La motivación detrás del fuerte diseño humanoide es la hipótesis de la cognición en el cuerpo (embodied cognition en inglés), que el robot pueda moverse y ser manipulado como un humano juega un rol importante en el desarrollo de la cognición humana.[2] Un bebé aprende muchas habilidades cognitivas por interaccionar con su entorno y otros humanos utilizando sus extremidades y sentidos, y consiguientemente su modelo interno del mundo es en gran parte determinado por la forma del cuerpo humano. El robot se diseñó para poner a prueba esta hipótesis permitiendo representar escenarios de aprendizaje cognitivo mediante una reproducción exacta del sistema perceptivo y la articulación de un niño pequeño, de modo que pudiera interactuar con el mundo del mismo modo que lo hace ese niño.[3]
Especificaciones
Las dimensiones del iCub son similares a un niño de 3 años y medio de edad. El robot está controlado por un control incorporado PC/104 el cual se comunica con los actuadores y sensores utilizando el protocolo de comunicaciones Bus CAN.
Utiliza articulaciones impulsadas por tendones para la mano y para el hombro, con los dedos flexionados con tendones cableados recubiertos con teflón, funcionando dentro de tubos recubiertos de teflón, y empujando unos resortes. Los ángulos de las articulaciones están medidos utilizando sensores de Efecto Hall con un diseño personalizado y el robot puede estar equipado con sensores de torsión. Las puntas de los dedos pueden estar equipados con sensores táctiles, y se está desarrollando una distribución de piel sensible.
La biblioteca de software está en gran parte escrita en C y utiliza YARP para la comunicación externa vía Gigabit Ethernet con software externo que implementa la funcionalidad de nivel más alto, el desarrollo del cual ha sido llevado a cabo por el Consorcio de RobotCub.[4] El robot no fue diseñado para operación autónoma, y por tanto no incluye baterías internas o los procesadores requeridos para su función — en cambio un cable umbilical proporciona energía y una conexión de red.
En su versión final, el robot tiene 54 grados de libertad organizados de la manera siguiente:
- 7 en cada brazo.
- 9 en cada mano (3 para el pulgar, 2 para el índice, 2 para el dedo corazón, 1 para la pareja de los dedos anular y dedo meñique, 1 para el aducción/abducción).
- 6 en la cabeza (3 para el cuello y 3 para las cámaras).
- 3 en el torso y cintura.
- 6 en cada pierna.
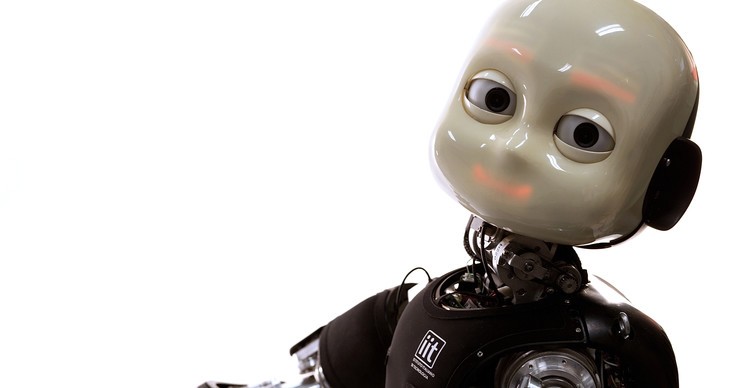
La cabeza tiene cámaras estéreo en una montura giratoria donde los ojos estarían localizados en el mismo lugar que en los humanos y los micrófonos en los lados. También tiene líneas de LEDs rojos representando la boca y las cejas, montados detrás del panel de la cara para hacer expresiones faciales.
Desde que los primeros robots fueron construidos, el diseño ha experimentado varias revisiones y mejoras, por ejemplo manos más pequeñas y más hábiles; unas piernas más robustas y ligeras con articulaciones capaces de realizar ángulos más grandes, la cual cosa les permite andar en vez de solo gatear.[5][6]
Capacidades de iCub
El iCub ha demostrado que tiene capacidades para realizar las siguientes acciones de manera satisfactoria, entre otras:
- Gatear, utilizando guías visuales con marcadores ópticos en el suelo.[7]
- Solucionar laberintos en 3D complejos.[8][9]
- Tiro con arco, lanzando flechas con un arco y aprendiendo para dar en el centro del objetivo.[10][11]
- Expresiones faciales, permitiendo a iCub expresar sus emociones.[12]
- Control de fuerza.[13]
- Coger objetos pequeños, como pelotas, botellas de plástico, etc.[14]
- Evitar colisiones en entornos no estáticos, es decir, que están en cambio. También evita colisiones entre partes de su cuerpo.[15][16][17]
iCubs por el mundo
Estos robots fueron construidos por el Istituto Italiano di Tecnologia (IIT) en Génova y son utilizados por una pequeña pero animada comunidad de científicos que utilizan el iCub para estudiar la cognición social en sistemas artificiales. Hay aproximadamente treinta iCubs en varios laboratorios, principalmente en la Unión Europea pero también hay uno en los Estados Unidos.[18] El primer investigador en América del Norte que fue aceptado para recibir un iCub fue Stephen E. Levinson, para estudios de modelos computacionales del cerebro y mente y adquisición de lenguaje.[19]
Los robots están construidos por IIT y cuestan alrededor de 250,000 euros, cada cual según la versión del mismo.[20][21] La mayoría del soporte financiero proviene de la unidad de la Comisión Europea E5 o del Istituto Italiano di Tecnologia (IIT) mediante el recientemente creado Departamento de Facilidad de iCub.[22] El desarrollo y la construcción del iCub en el IIT forman parte de un documental independiente titulado Plug & Pray que se estrenó en 2010.[23]
Véase también
- Android
- Inteligencia artificial
- Cyborg
- Robótica
Referencias
Enlaces externos
- Nosengo, Nicola (27 de agosto de 2009). «Robotics: The bot that plays ball». Nature 460 (7259): 1076-8. PMID 19713909. doi:10.1038/4601076a. Consultado el 30 de julio de 2010. - Nature article about the iCub.
- Canal de YouTube/Youtube - un canal de YouTube/Youtube sobre el iCub.
- iCub Presentaciones - del Humanoid simposio de robótica 2010.
- IROS'10 - Vídeos y taller en iCub búsqueda (2010).
- Hacia Inteligente Humanoids - el vídeo que muestra capacidades actuales del iCub (2012)
- RobotCub Consortium
- the iCub project